 Fraunhofer-Institut für Siliziumtechnologie
Fraunhofer-Institut für SiliziumtechnologieTechBlog des Fraunhofer ISIT
Mensch und Roboter sind schon heute in vielen Arbeitsräumen enge Kollegen. Dadurch eröffnet sich die Möglichkeit, die kognitiven und flexiblen Fähigkeiten des Menschen durch die Präzision und Ausdauer von Robotern optimal zu ergänzen und höchste Produktivität zu erreichen. Voraussetzung dieser Mensch-Roboter-Kollaboration (MRK) ist jedoch ein hohes Maß an Sicherheit. Bisherige Sensorlösungen können eine umfassende intelligente Abdeckung der Umgebung nicht realisieren. Mikromechanische Ultraschall-Wandler (MUT) stellen dabei eine innovative und effektive Weiterentwicklung dar, die durch ihre kompakte Bauweise und ihre Leistungseffizienz neue Anwendungsbereiche erschließen können.
Sichere Interaktion von Menschen und Robotern mittels Sensorlösungen.
Aktuell verfügbare Sensorlösungen und ihre Hürden
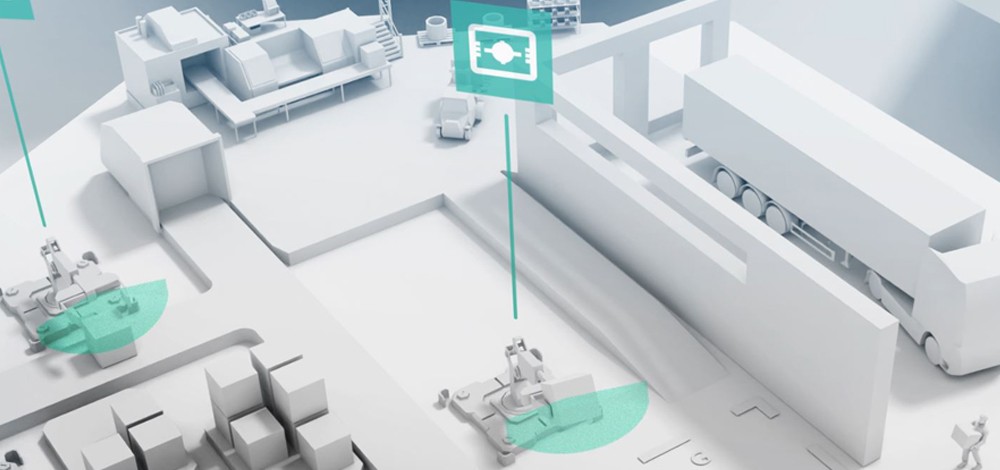
Aktuell verfügbare Sensorsysteme zur Umgebungserkennung erfassen entweder den direkten Kontakt zwischen Mensch und Maschine mittels direkter oder indirekter Kraftsensoren oder die Annäherung mittels 3D-Kameras oder kapazitiven Sensoren. Die Hauptproblematik dieser Systeme liegt zum einem in der fehlenden Redundanz verschiedener Sensorprinzipien. Hierdurch kann eine Fehldetektion auftreten. Zum Beispiel kann ein kapazitiver Sensor alleine keine Körper mit geringer Dielektrizitätskonstante (z.B. Kunststoffe) erkennen. Weiterhin decken die Sensorsysteme meistens nur einen begrenzten Raum der Maschine ab. Eine Abdeckung aller Zonen (Nah- und Fernbereich) wäre wünschenswert, um eine komplette Detektion aller Körper im Umfeld zu garantieren. Zusätzlich ist die Einrichtung der Sensoren oft aufwendig und benötigt eine gute Kenntnis der Maschinenumgebung. Eine sichere Umgebungserkennung in der MRK erfordert deswegen integrierte, vernetzte, redundante und intelligente Erkennungssensoren.
Ultraschallsensoren
Ultraschallsensoren werden bereits heute in zahlreichen Anwendungsgebieten für die Umgebungsüberwachung und Objekterkennung eingesetzt: Die Einparkassistenz in der Automobiltechnik, die Anwesenheitsdetektion und Füllstandmessung in der Fabrikautomatisierung sowie die Entwicklung mobiler Roboter sind hierbei nur einige Beispiele. Dabei werden Distanzen im Bereich weniger Zentimeter bis einiger Meter abgedeckt. Das Messverfahren beruht auf dem Senden von Ultraschallwellen und der Detektion von Echosignalen aus der Umgebung. Aus der Laufzeit und der Amplitude des reflektierten Signals sowie einer Frequenzverschiebung werden quantitative Aussagen über Abstände und Bewegungen von Hindernissen innerhalb der Sensorreichweite abgeleitet.
Ultraschallverfahren zeichnen sich hierbei im Vergleich zu optischen und kapazitiven Methoden dadurch aus, dass die Abstands- und Bewegungsdetektion auch in dunklen bzw. opaken Umgebungen einsatzfähig bleibt und aufgrund längerer Signallaufzeiten mit einem geringeren Detektionsaufwand verbunden ist. Der geringere Umwelteinfluss von Luftfeuchtigkeit, Luftdruck sowie Partikeln auf die Leistungsfähigkeit sowie der Verzicht auf ionisierende bzw. intensive optische Strahlung ermöglichen zudem eine sichere Erfassung in rauen Umgebungen.
Derzeit werden Ultraschallsensorsysteme hauptsächlich durch bleihaltige Piezo-Keramiken und Kompositverbindungen mittels feinmechanischer Herstellungsverfahren realisiert. Die steigende Komplexität von Mess- und Prüfaufgaben in der MRK erfordert jedoch ein steigendes Maß an Sensorminiaturisierung und der lokalen Integration intelligenter Datenverarbeitung in Echtzeit, beispielsweise in Online-Überwachungssystemen oder der Einbettung von reaktiven Greifersystemen. Zudem ist dieser Ansatz hinsichtlich des Auflösungsvermögens insbesondere im Nahdistanzbereich sowie der RoHS-Konformität eingeschränkt. Demnach werden diese Sensorsysteme den Anforderungen der nächsten Robotergeneration nicht gerecht.
Die mikromechanischen Ultraschallwandler (MUT) basierend auf MEMS sind ein vielversprechender Sensoransatz, um diese Hürden zu überwinden. Diese miniaturisierten Systeme profitieren von zuverlässigen Herstellungsprozessen in CMOS-Technologien, die eine kostengünstige und RoHS-konforme Produktion von Sensoren in hohen Stückzahlen ermöglichen. MUTs sind für ein breites Spektrum von Ultraschallfrequenzen fertigbar, so dass applikationsspezifische Reichweiten und Auflösungsvermögen möglich sind. Dabei können Sensorlösungen sowohl in einkanaligen Strukturen als auch in beliebigen zweidimensionalen Arraystrukturen gefertigt werden. Letztere ermöglichen die Anwendung von bildgebenden Verfahren zur Umgebungsüberwachung. In Verbindung mit einer on-Chip Sensorsteuerung und Embedded-KI werden zukünftig intelligente MUT-Systeme für die Einbindung in Sensornetzwerke zur multimodalen Umgebungsüberwachung bereitstehen und die kollaborative Interaktion zwischen autonomen Robotersystemen und Menschen ermöglichen.