 Fraunhofer Institute for Silicon Technology
Fraunhofer Institute for Silicon TechnologyTechBlog of the Fraunhofer ISIT
Humans and robots are already close colleagues in many workspaces. This opens up the possibility of optimally complementing the cognitive and flexible capabilities of humans with the precision and endurance of robots and achieving maximum productivity. However, a prerequisite of this human-robot collaboration (HRC) is a high level of safety. Previous sensor solutions cannot realize comprehensive intelligent coverage of the environment. Micromechanical ultrasonic transducers (MUT) represent an innovative and effective further development in this respect, which can open up new areas of application thanks to their compact design and performance efficiency.
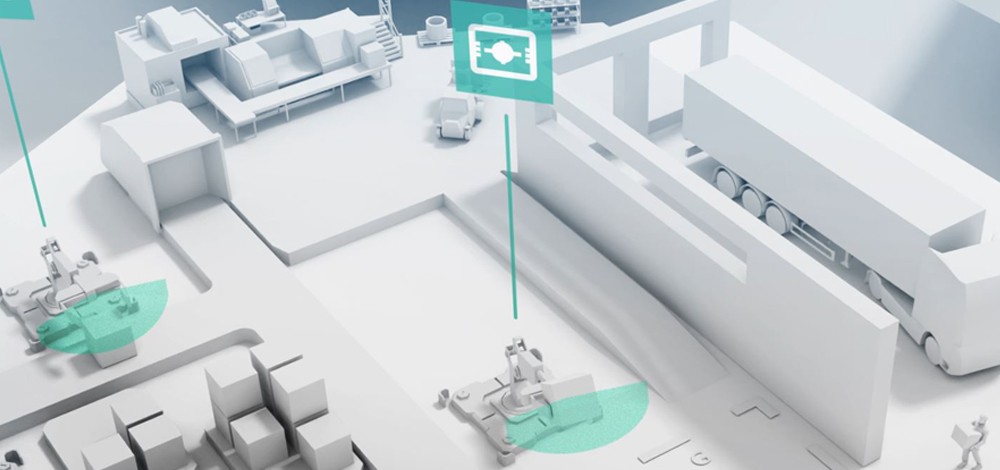
Sichere Interaktion von Menschen und Robotern mittels Sensorlösungen.
Currently available sensor solutions and their hurdles
Currently available sensor systems for environment detection record either the direct contact between man and machine by means of direct or indirect force sensors or the approach by means of 3D cameras or capacitive sensors. The main problem of these systems is on the one hand the lack of redundancy of different sensor principles. This can lead to false detection. For example, a capacitive sensor alone cannot detect bodies with low dielectric constant (e.g. plastics). Furthermore, sensor systems usually cover only a limited area of the machine. Coverage of all zones (near and far) would be desirable to guarantee complete detection of all bodies in the environment. Additionally, the setup of the sensors is often complex and needs a good knowledge of the machine environment. Therefore, a safe environment detection in the MRK requires integrated, networked, redundant and intelligent detection sensors.
Ultrasonic sensors
Ultrasonic sensors are already used in numerous applications for environment monitoring and object detection: Parking assistance in automotive technology, presence detection and level measurement in factory automation, and the development of mobile robots are just a few examples. Distances in the range of a few centimeters to a few meters are covered. The measurement method is based on the transmission of ultrasonic waves and the detection of echo signals from the environment. Quantitative statements about distances and movements of obstacles within the sensor range are derived from the transit time and amplitude of the reflected signal as well as a frequency shift.
Compared to optical and capacitive methods, ultrasonic methods are characterized by the fact that distance and motion detection can also be used in dark or opaque environments and requires less detection effort due to longer signal propagation times. The lower environmental impact of humidity, air pressure as well as particles on the performance as well as the absence of ionizing or intense optical radiation also enable reliable detection in harsh environments.
Currently, ultrasonic sensor systems are mainly realized by leaded piezoceramics and composite compounds using precision mechanical manufacturing processes. However, the increasing complexity of measurement and inspection tasks in MRC requires an increasing degree of sensor miniaturization and the local integration of intelligent data processing in real time, for example in online monitoring systems or the embedding of reactive gripper systems. In addition, this approach is limited in terms of resolution capability, especially in the near distance range, as well as RoHS compliance. Accordingly, these sensor systems will not meet the requirements of the next generation of robots.
Micromechanical ultrasonic transducers (MUT) based on MEMS are a promising sensor approach to overcome these hurdles. These miniaturized systems benefit from reliable fabrication processes in CMOS technologies that enable cost-effective and RoHS-compliant high-volume sensor production. MUTs are manufacturable for a wide range of ultrasound frequencies, enabling application-specific ranges and resolving power. Sensor solutions can be manufactured in single-channel structures as well as in arbitrary two-dimensional array structures. The latter enable the application of imaging techniques for environmental monitoring. In combination with on-chip sensor control and embedded AI, intelligent MUT systems will be available in the future for integration into sensor networks for multimodal environmental monitoring and enable collaborative interaction between autonomous robot systems and humans.